Video—Roach-like Robots Act Collectively
Swarms of insects or populations of microbes can produce surprisingly coordinated phenomena, even though each individual operates with very simple rules. Hamid Kellay of the University of Bordeaux in France and his colleagues have demonstrated similar behavior in roach-like, battery-powered robots that skitter around randomly inside a corral. Previous researchers have also observed self-propelled swarmers in enclosed regions, but Kellay's team documented new forms of collective motion using movable corrals. The ultimate aim of this body of research is to produce small, simple robots that team up for a variety of tasks, such as self-assembly or exploration.
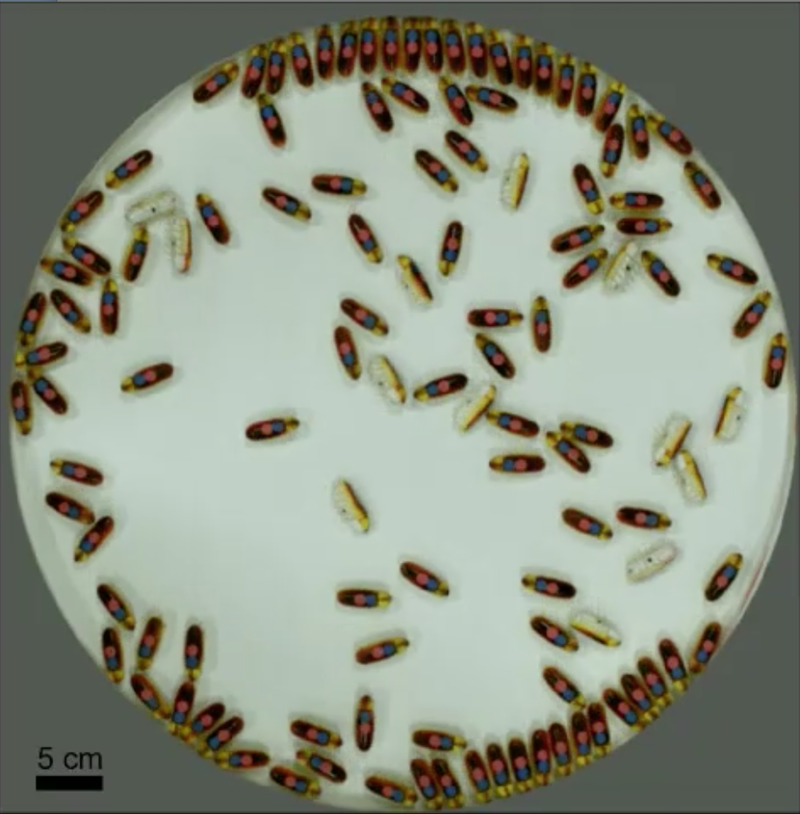
The roach-bots used by Kellay and colleagues are commercial toys a few centimeters long that move at speeds of around 30 centimeters per second by vibrating on top of stiff, angled legs. The team showed that when a small number of bots is corralled, they bounce around like a 2D gas of molecules. But above a critical number (which depended on several parameters), some fraction of the bots line up in one or more tight clusters along the corral boundary (see first video). The gas and cluster populations remain in equilibrium, with members of each population continually being exchanged. The researchers also found that the unified pushing of the cluster bots could drive collective motion. By selecting a corral that was both flexible and mobile, they showed that the robot army could push its enclosure smoothly through a narrow aperture or roll it around an obstacle (see second and third videos).
This research is published in Physical Review Letters.
–David Ehrenstein
David Ehrenstein is a Senior Editor for Physics Magazine.
More Information
2013 video about Harvard research with similar robots in fixed corrals.