Sandy Scaling Law
Getting trapped in a sand pit is a nightmare scenario for space rovers like NASA’s Curiosity or, closer to home, for anyone who drives in the desert. But calculating exactly how a vehicle’s wheels interact with and move across billions of individual sand grains isn’t trivial. Now Ken Kamrin and colleagues at the Massachusetts Institute of Technology, Cambridge, have derived a set of scaling laws that relate the size, mass, and spin rate of a wheel, as well as the environment’s gravity, to its ability to move across a sand bed. The researchers suggest that these simple relations could be employed to accurately predict the performance of tanks, trucks, or space rovers in sandy environments using scaled-down vehicle models in the lab.
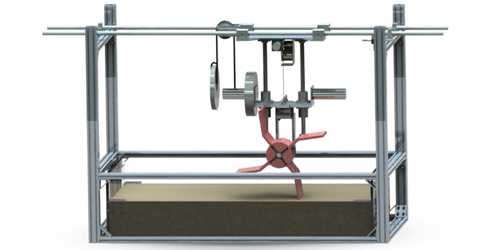
The team considered a wheel of arbitrary shape and mass rolling over a sandy surface with a fixed rotational rate. Treating the sand as one continuous medium rather than a collection of individual grains, they calculated how much the sand pushes back—the resistive force—as the wheel pushes down. This allowed them to derive scaling equations for how much power is needed to drive a wheel over the sand and for the resulting translational velocity with which the wheel moved. Experiments with differently sized cylindrical and lug wheels, which have four arms and appear to “walk” across the sand, digging little pockets of sand as they go, as well as simulations of bar-shaped wheels, which move by flipping end-over-end, showed good agreement with the theory as the wheels’ loading, spin rate, and ambient gravity were varied—the data all collapsed onto the same predicted lines.
This research is published in Physical Review E.
–Katherine Wright
Katherine Wright is a Contributing Editor for Physics.