Robot Shows How to Jump High
You might expect that a basketball player’s highest jump comes when the timing of the motion matches the natural, mechanical oscillation time of the player’s legs. But experiments with a simple jumping robot described in Physical Review Letters found that jumping is optimized when the timing is slightly different from the natural, or resonant, frequency of the jumper. The researchers’ results agreed with their mathematical model and point the way to better robotic design and a better understanding of the movement of living creatures.
Many studies of jumping have been done by physiologists and roboticists. But these investigations generally use models that reflect real human, animal, or robotic legs, which have joints (sometimes more than one) and the freedom to move at various angles. All of that complexity can make it challenging to study the fundamental motion.
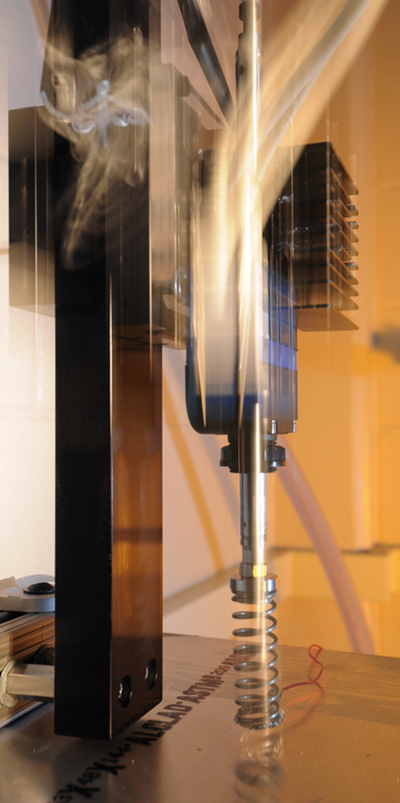
A team led by Daniel Goldman and Kurt Wiesenfeld of the Georgia Institute of Technology in Atlanta (Georgia Tech) wanted to get at the very essence of jumping. They made a jumping robot by fixing a “linear motor actuator” onto a rod, so that the motor could push or pull the rod by any amount, according to a computer program. They attached a spring to one end of the rod and stood the assembly vertically on a metal platform, with the spring at the “foot.” In this arrangement, the weighty actuator could climb or descend along the rod, and with rapid motion it could cause the spring to compress and then expand, lifting the whole structure into the air.
Goldman and his student Jeff Aguilar measured the jump height for a variety of motions of the actuator. In each case, the actuator moved through a complete up-and-down cycle, with an amplitude of millimeters, ending up at its starting point relative to the rod. But the researchers used different speeds (frequencies up to hertz) and phases—meaning the actuator sometimes moved up first and sometimes moved down first— different jumps in all, each repeated three times.
The researchers expected the highest jump to occur when the actuator’s single oscillation was at the same rate as the weighted spring’s natural (resonant) oscillation frequency. Most oscillating systems hit their maximum when driven at their resonant frequency.
But they were wrong. The robot jumped highest in two distinct modes, neither of which was at resonance. In the “single jump” mode with the highest jumps, the actuator moved faster than the resonant frequency, first up, pushing the rod downward and compressing the spring, and then down, as the spring expanded, sending the robot airborne. The analogous movement in a person would be to squat down and then powerfully push up off the floor.
The optimal “stutter jump”—the second high-jumping mode—was slower, with the actuator first moving down, lifting the rod off the platform in a small initial hop. Next, the robot landed, compressed the spring, and made a larger jump, which coincided with the actuator moving upward on the rod. This jump used only one-tenth the power expended in the single jump. This jump was like a person bending his torso to bring his knees to his chest and then jumping up. A person doing this actually pulls up on his feet when he bends down, though his feet do not leave the ground during this initial phase, as the robot’s foot does. After these surprising observations, Wiesenfeld and his student Alex Lesov developed a mathematical model that fully agreed with the experiments.
Muscles and tendons act somewhat differently than springs, and it’s not clear if the robot analyzed by the Georgia Tech team is exactly analogous. But anecdotal evidence suggests it is, says Goldman. Bushbabies, a type of African primate, appear to perform a stutter jump to reach a high platform, and basketball players running and jumping close to the basket do something similar.
The results show that “interesting and surprising discoveries can still be made with simple models,” says Noah Cowan, a roboticist at Johns Hopkins University in Baltimore. Although living creatures and most robots have many more ways of moving than the simplistic weight-on-a-spring used in this experiment, Cowan says the results give a good starting point if you’re designing a more sophisticated jumping robot.
–Kim Krieger
Kim Krieger is a freelance science writer in Norwalk, Connecticut.
More Information
Goldman lab description of jumping robot, with animation of stutter jump and single jump
Goldman lab interactive demo of jumping robot
Kobe Bryant does a stutter jump over a moving car (not real—uses special effects)