Fruit Fly Aerial Maneuver Explained
Insects can execute flying feats more impressive than fighter jets, and a team of researchers has now learned the trick behind one of them. They used high speed video cameras and a new 3D reconstruction technique to show how fruit flies execute their acrobatic turns. As they report in the 9 April Physical Review Letters, despite the complex wing motions, a fly can execute quick pirouettes by adjusting just a single parameter that controls the difference between the way its left and right wings oscillate. The results may be relevant for engineers designing flight control strategies for tiny robotic insects for search-and-rescue and surveillance.
Insects flap their wings hundreds of times per second. The flapping motion of a fly is mainly forward-and-back, generating thrust somewhat like the oars of a rowboat. But they also tilt, or change “pitch,” during each flap cycle, corresponding to rotating the handle of the oar, changing the angle of the blade relative to the surface of the water. The wings tilt forward on the forward stroke and backward on the reverse stroke. Researchers have recently made progress in modeling the aerodynamic forces involved in the rapid and complex motion of insect wings, and they would ultimately like to mimic insects’ exquisite control in insect-sized flying robots.
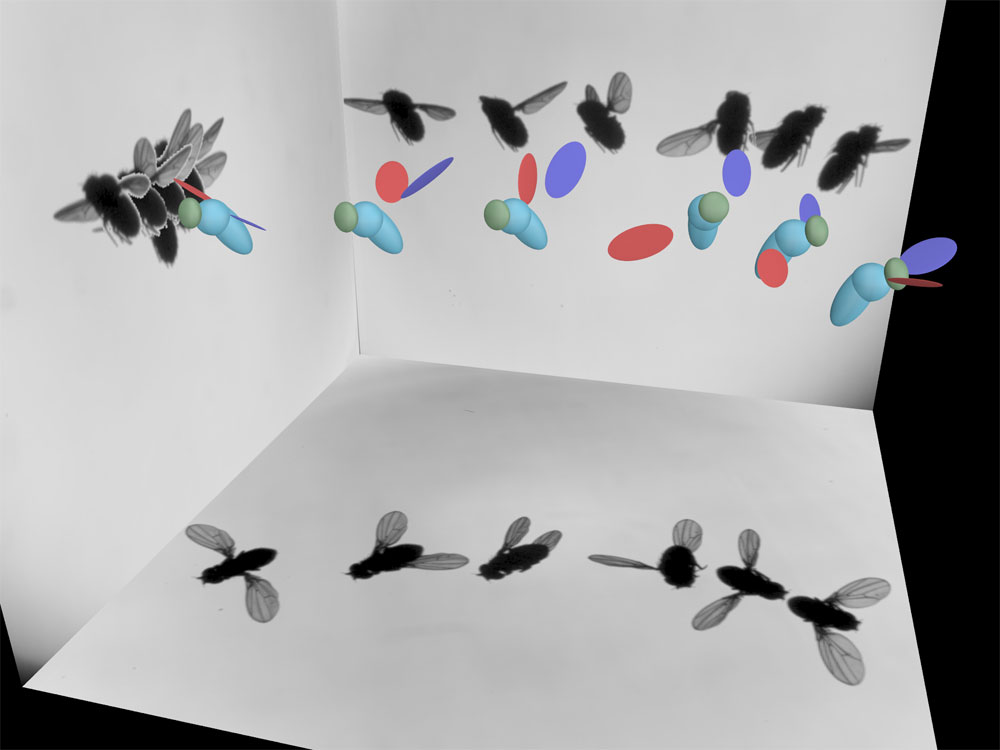
To study insect maneuvers, Jane Wang and Itai Cohen of Cornell University and their colleagues put several flies in a chamber that was illuminated from three perpendicular directions by bright projectors. When a fly passed through a pair of crossed laser beams, three high-resolution cameras were triggered to film at 8000 frames per second. Each camera recorded the fly’s shadow from one of the projectors. A new computer algorithm developed by the group automatically combined the two-dimensional silhouettes into a three-dimensional reconstruction of the fly.
The team focused on the positions of the fly’s body and wings as it underwent a so-called yaw turn of 120 degrees, corresponding to an airplane turning around in mid-flight to face nearly the opposite direction. During steady flight the fly’s left and right wings flapped identically, but not during the turn. The right wing flapped at an average pitch angle of 49 degrees to the horizontal on the front stroke and 40 degrees on the back stroke. The larger angle on the front stroke exposed more surface area, which resulted in more air resistance to forward motion on that side of the fly, whereas the left wing flapped with little difference between its strokes. Effectively, the fly used its left wing to obstruct the flow, generating a turning force.
To understand how the fly controls these wing pitches, Wang and her team analyzed the positions of the wings and the relevant equations of rotational motion. They found that the wing hinges provide the same forces as a rotational spring, with the wings oscillating in pitch by tilting forward and back with respect to a roughly vertical equilibrium position. The asymmetry between forward and backward strokes comes from rotating the equilibrium position away from vertical–tilting it backward increases the wing’s average pitch during forward strokes and decreases it for reverse strokes.
The team found that during the turn, the equilibrium positions differed between the wings by 10 to 15 degrees. Rather than actively controlling the angles and speeds of the wings continuously, as an autopilot might control the ailerons and rudder of a plane, the fly only controls this single variable–the relative equilibrium pitch angles of its wings. The rest is taken care of by the wings’ passive, spring-like twisting.
Rob Wood, a Harvard University engineer who builds small robotic insects, thinks the work is encouraging. “Any mechanism that could lead to simple mechanisms for flight control is potentially valuable to us engineers.”
–Michelangelo D'Agostino
Michelangelo D’Agostino is a physicist and freelance science writer in Berkeley, California.