Meetings: Travel Advice for a Trip to the Red Planet
Picking a landing site for a Mars rover isn’t easy. The location has to be flat, lie at low elevation, and be free of dust and rocks, all so that the SUV-sized rover can touch down without crashing. The site must also be close to the region scientists want to study or else the slow-moving rover, which tools about at a tortoise’s pace, won’t reach its destination within the time frame of the mission.
But combing through detailed maps of the Martian surface to select the right site can take scientists years. And in the end, the selection process is very subjective. “We need something smarter,” says Guillaume Rongier of the Haystack Observatory at the Massachusetts Institute of Technology.
That’s why Rongier, a geologist, and Victor Pankratius, a computer scientist also at the Haystack Observatory, have developed a quicker, more systematic approach that uses artificial intelligence (AI), instead of humans, to mine the geographical data. Speaking last month at the fall meeting of the American Geophysical Union in New Orleans, Rongier presented the first maps of favorable locations found in this way.
The red planet has a surface area of roughly 145 million square kilometers, similar to the area of Earth’s landmass. Its myriad geological features include the highest mountain and volcano in the solar system and dried-up lakes that might once have supported life. In short, there’s a lot to see. And although much of the rugged terrain on Mars is too steep or rocky for today’s rovers, a significant fraction of the planet should be accessible. Yet when planning which regions to explore, scientists tend to consider the same possibilities, partly because they host good places to land.
“When you look at proposals for rovers like NASA’s Curiosity and Mars 2020, and [ESA’s] ExoMars, some areas come up over and over again,” says Rongier. “Some regions are particularly interesting to visit, but are they the only ones? What about other places?”
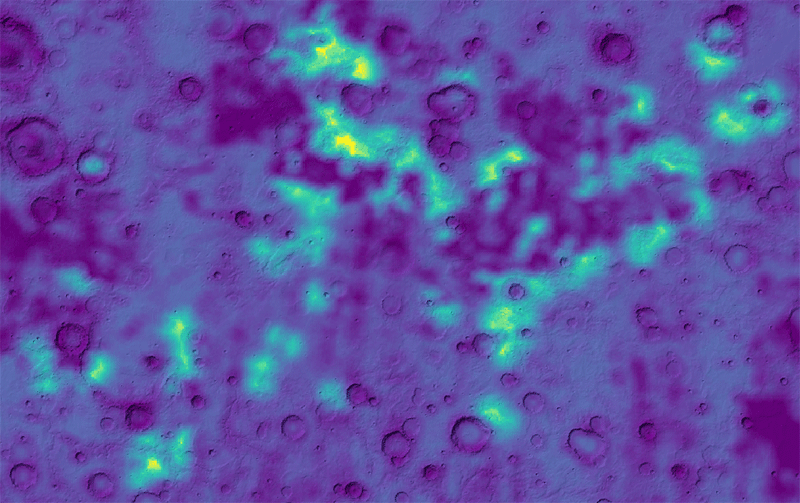
To search for other possibilities, the team designed an algorithm based on “fuzzy logic,” which allows answers to questions to have “degrees” of truth. They then had this algorithm search through elevation maps of Mars, in which each point is also tagged with other information, such as the dust level and the local geology. The algorithm’s output is a “favorability” map of the entire planet: a set of locations that meet some or all of a set of criteria, such as the rover’s landing needs, its proximity to the exploration site, and the mission’s scientific goals (e.g., searching for water or ancient life).
Rongier likens the AI algorithm to playing a game. The “rules” are the mission criteria, and the “gameboard” is the geological data. The algorithm runs through different plays on this board and spits out “winning” solutions.
“It’s similar to what people already do,” says Rongier. But it’s also quicker: the proof-of-concept algorithm currently takes a day or two to produce a favorability map, but optimizing it could reduce this time to a few hours. And it can more easily handle the increasing volume of satellite data about Mars. Plus, scientists can tinker with the game’s rules to see how the outcome changes.
For their first test run, the team fed the rover parameters and scientific goals for Mars 2020 into the algorithm. The program duly flagged two navigable regions, Margaritifer Terra and Meridiani Planum, as the most favorable spots for the mission. (Meridiani Planum was where NASA’s Opportunity rover landed in 2004, and two locations in Margaritifer Terra made the original shortlist of landing sites for Mars 2020.)
But when they tuned some parameters even slightly, other locations started to look compelling. For example, the team ran their algorithm for rovers that could land at elevations higher than 500 m—the upper limit for Mars 2020—and travel faster than current models. Not surprisingly, both changes opened up more of Mars for rover exploration. But a particularly dramatic finding was that the number of accessible sites should increase exponentially with driving speed.
Having a tool that uses data to guide design is an exciting prospect, Rongier believes. With it, scientists would be able to say to engineers, “We want to go there, so we need these characteristics in the rover,” he says.
The tool is still in its prototype phase. And although NASA partially funded Rongier’s and Pankratius’ work, it doesn’t currently have plans to use the new algorithm to help select landing sites. But Michael Hecht, who is developing instruments for the Mars 2020 mission, says the algorithm could aid scientists by adding a “level of sophistication” to the selection process. (Hecht is also at the Haystack Observatory but not involved in the research.) Matthew Golombek, a scientist at NASA’s Jet Propulsion Laboratory in California, who contributes to the selection process for Mars-mission landing sites, agrees that he and others could find a use for the tool. But, he says, the algorithm “would never replace the process we currently use.”
–Katherine Wright
Katherine Wright is a Contributing Editor for Physics.