Flying Insects and Their Robot Imitators
Despite its meager appearance, the fruit fly is a first-class flying machine. It can generate lift with tiny wings that defy simple aerodynamic rules. Its wing muscles cycle at 200 times per second, making them some of the fastest muscles on the planet. And it has a rapid response to predators (and annoyed humans) that would be the envy of any fighter pilot.
For years, biologists have investigated the flight secrets of fruit flies, as well as those of bees, mosquitos, and moths. Insect flight attracts so much interest because it shows nature’s triumph over a highly complicated problem. “Flying is just difficult,” says biologist Michael Dickinson from the California Institute of Technology. “Flight really pushes the envelope of organismal design.” To get in the air, flying animals need powerful and highly responsive muscles. They also need fast visual systems and unique sensing capabilities, such as rotation sensors and magnetic field receptors. “Flying animals are virtuosos at many, many things,” Dickinson says.
But one thing that mosquitoes and flies are not good at is obedience. “It’s hard to get animals to do specific things,” says biomechanical engineer Nick Gravish from the University of California, San Diego. “If you want to test how a certain wing movement affects lift and drag forces, you can’t ask an animal.” For this reason, researchers have often turned to robotic models of insects. The earliest versions were simple wing structures, but engineers are now creating autonomous flying machines. These robo-bugs do not completely resemble the real thing, but they are providing some new insights into how insects are able to maneuver and how they respond to collisions.
Swimming Through the Air
Early efforts to understand insect flight got off to a bad start. Calculations made over 80 years ago found that the flight of the bumblebee was impossible, as its wings are too small and its speed too slow to generate enough lift to keep its plump body aloft. The fault in this reasoning was to assume that the aerodynamic principles of airplanes and birds apply to bees and flies, when in fact insects employ an entirely unique flight strategy.
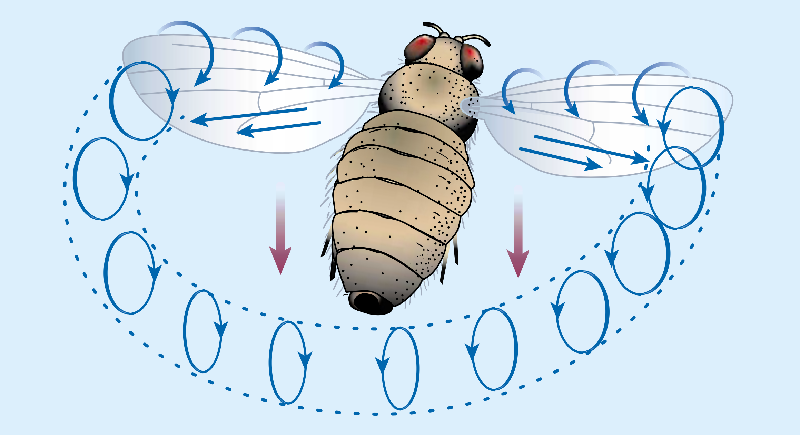
The motion that insects use is closer to swimming or treading water than to what we normally think of as flying. Rather than flapping up and down like a bird, insects move their wings forward and backward. During the forward stroke, the wings are tilted at roughly 45° with respect to the horizontal, thus pushing down on the air, which exerts an upward force, or lift, on the insect. During the backward stroke, the wings are flipped over to 135° so that they continue to push down on the air and generate lift.
For an airplane, a large wing-tilt, or “angle of attack,” is catastrophic—nosing up too steeply causes it to suddenly lose all lift and fall rapidly, an event called an aerodynamic stall. The key insights explaining why insects don’t stall came in the 1990s from robotic representations of insects, like the Robofly from Dickinson’s lab [1] and the Flapper, created by Charlie Ellington from Cambridge University in the UK [2]. These mechanical models were much larger than real insects, but the researchers used tricks to reproduce insect flight conditions. For example, the Robofly operated in mineral oil, which mimicked the gooey flow of air experienced by a small bug. The teams also flapped the robot wings at a slower rate, making it easier to visualize the fluid motion.
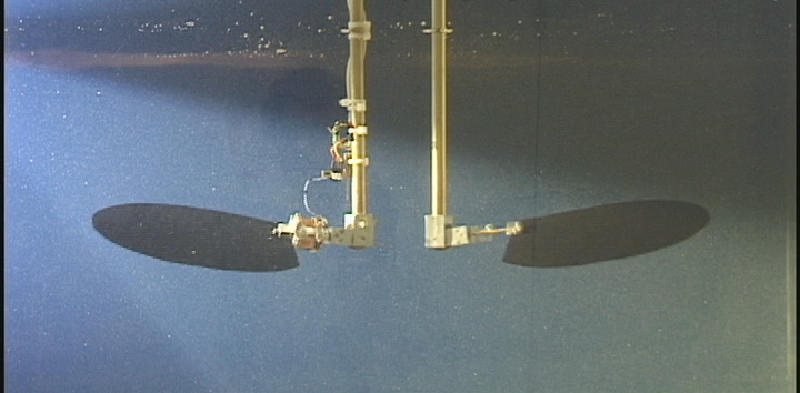
The robot experiments revealed tiny whirlwinds, called leading-edge vortices, that produce a negative pressure that “sucks” the wing upward, so that a stall is avoided. In addition, the researchers were able to measure the forces acting on the wings, which helped them uncover how insects are able to fly in different directions just by changing their flapping behavior. “Robots have been enormously important in studying the aerodynamics of flying insects,” says biologist Florian Muijres of Wageningen University in the Netherlands.
This early robot work helped explain why insects adopted their unique flight strategy. Bird-like flapping—up and down at a low angle of attack—would only generate enough lift for a centimeter-sized insect if it flapped its wings extremely fast. However, bumblebees already flap 250 times per second. Mosquitoes flap 600 times per second. “Insects hit a limit on how fast they can flap their wings,” Dickinson says. They compensate for this flapping limit by tilting their wings to a high angle of attack, which provides more lift than birds can produce. The downside of this high tilt is greater air resistance, or drag. In fact, insects are stuck with a lift-to-drag ratio of only around one, which is about 10 times less than that of birds and 100 times less than that of airplanes. “Insects are ridiculously inefficient as flying devices go,” Dickinson says. “As a consequence, they're just burning through fuel, which makes them hungry all the time.”
Fly Mimicry
By the early 2000s, a basic understanding of insect flight had developed, and engineers began cribbing the notes from biologists to see if they could use some insect tricks to help them build centimeter-scale robot flyers. One might wonder if mimicking insects is the best option, given their inefficiency. Wouldn’t a helicopter-like rotating propeller be better for a centimeter-scale flyer? “It turns out that, like animals, tiny robots are beholden to how physics changes with scale,” says robotics engineer Sawyer Fuller from the University of Washington (UW), Seattle. Rotating electric motors work great for large robots, but as they shrink in size, they become less efficient due to spinning friction in bearings and heat losses in magnetic coils. So Fuller and other roboticists have explored using piezoelectric actuators that produce a back-and-forth force that is similar to the flapping action in insects.
“I am not sure that anybody is certain that fly-like flapping wings are the best or most efficient morphology for a small flying robot,” Fuller says. “It is just that as engineers, we have to admit that our powers of imagination are limited, so it makes sense to start by mimicking biology.”
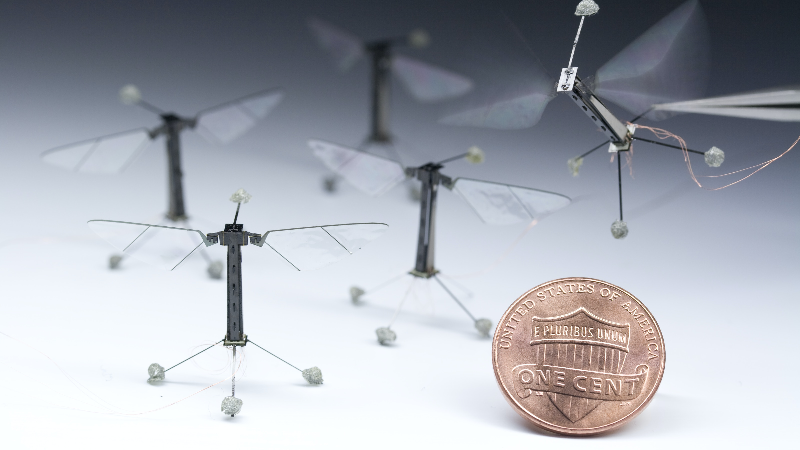
In 2013, Fuller and other colleagues in Rob Wood’s group at Harvard University released the first Robobee, a flapping robot with a 3-centimeter wingspan [3]. This 80-milligram machine could hover for 7 seconds and perform controlled flight movements. However, because batteries are heavy, it required a tether for power. It also had no “brains” on board, as all sensing and flight commands were done by external systems.
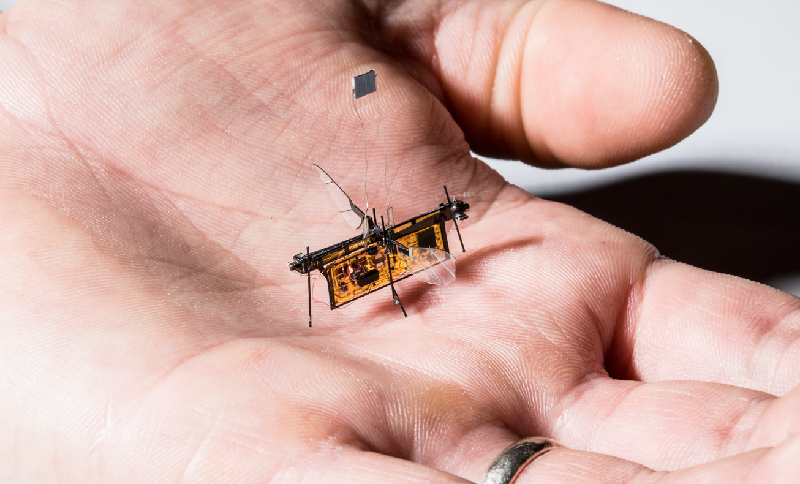
But many newer robots from Harvard and other groups are untethered and can carry some sensors and simple electronic controllers. For example, Fuller’s team at UW recently built a 100-milligram, free-flying robot that carries a small microprocessor to control the flapping of its fly-like wings [4]. The researchers imagine that swarms of these small bots could one day search for survivors in a fallen building, surveil criminal suspects, or sniff out gas leaks.
“The robots are getting better all the time,” says physicist Itai Cohen from Cornell University. He thinks that the robot successes demonstrate the accuracy of the insect flight models. And in a form of “cross-pollination,” the robots are providing new insights into how insects are able to fly so well.
Swat Evasion Maneuvers
One place where robots are helping biologists is with insect maneuverability. Unlike birds, insects have no tail for steering. Instead, they maneuver through slight adjustments to their wing motion. For example, by reducing the length of the forward and backward swing of its wings, a bug can control its pitch, which is the tilt of its body relative to horizontal.
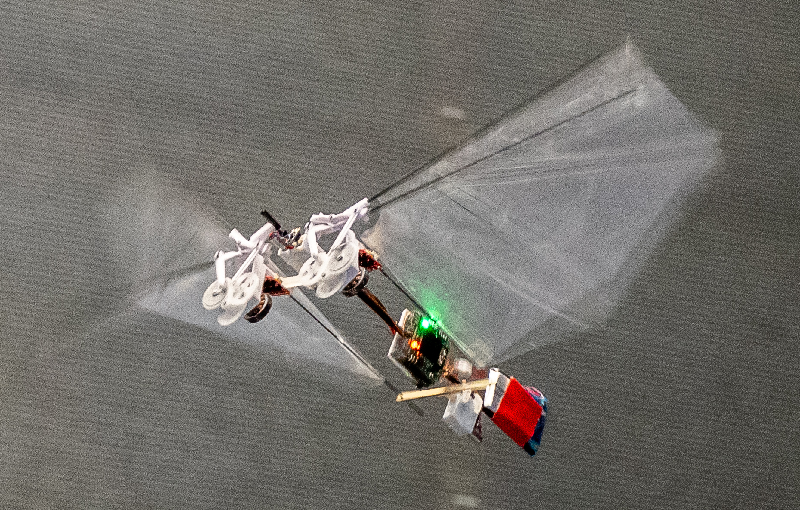
With his colleagues at the Delft University of Technology, in the Netherlands, Muijres explored the maneuverability of insects using a tailless, free-flying robot called DelFly Nimble [5]. This robot does not look like a fruit fly—it is 55 times bigger and has four wings, rather than two—but it can be programmed to take evasive maneuvers like a fruit fly. “Fruit flies make these really rapid banked turns to avoid danger,” Muijres says. Earlier observations of real flies suggested that these turns are produced with changes only to roll (banking) and pitch, but not rotation in the horizontal plane, called yaw.
To test this hypothesis, Muijres and colleagues turned off the yaw control in DelFly during rapid maneuvers. Surprisingly, they found that the DelFly automatically yawed to keep itself flying straight. “It turns out there is an aerodynamic coupling mechanism whereby if you generate the right amount of roll and pitch torque, this mechanism turns your nose in the direction of flight,” Muijres says. The same mechanism seems to be operating in flies as well. “We probably wouldn’t have found this mechanism without the DelFly,” he says.
Inspiration in Reverse
Like the DelFly study, other work is using robots to gain biological insights. One of the current trends is to design more responsive robots to study “emergent behavior,” Gravish says. In practice this means controlling one parameter, like the wingbeat frequency, while letting other parameters, like wing angle, be free to react to forces from the environment. Having responsive robots like this allows researchers to study the feedback mechanisms that control insect flight behavior.
As an example of this robotics-inspired biology, Gravish cites a recent study that looked at what keeps insects flying straight when they bump into an obstacle, such as a window or a fellow insect [6]. “How much of this stabilization is done by the brain, and how much is embedded in the mechanical response of the body?” Gravish asks. To investigate this question, researchers placed flexible elements into a robot’s wing and showed that the passive response of the wings was able to resist perturbations; no brain power is necessary.
Dickinson is less convinced that free-flying robots will provide insights for biology. “I think that the connection between flying robots and insects is pretty superficial,” he says. Engineers are trying to get a small machine to fly, but they aren’t using muscles or neurons, so the parameters are all different. He thinks computer simulations can come closer to replicating what is going on in insect flight.
Gravish agrees that computer simulations are very powerful. But his philosophy is that you get a more intuitive understanding of a problem by creating mechanical models and seeing how they perform on their own. He also admits that engineers are still far from building a tiny robot that can fly on its own for more than a few seconds. “It gives you a lot of appreciation for insects and how easy they make it look,” Gravish says.
–Michael Schirber
Michael Schirber is a Corresponding Editor for Physics based in Lyon, France.
References
- J. M. Birch and M. H. Dickinson, “Spanwise flow and the attachment of the leading-edge vortex on insect wings,” Nature 412, 729 (2001).
- C. P. Ellington et al., “Leading-edge vortices in insect flight,” Nature 384, 626 (1996).
- K. Y. Ma et al., “Controlled flight of a biologically inspired, insect-scale robot,” Science 340, 603 (2013).
- J. James et al., “Liftoff of a 190 mg laser-powered aerial vehicle: The lightest wireless robot to fly,” 2018 IEEE International Conference on Robotics and Automation (ICRA) (2018).
- M. Karásek et al., “A tailless aerial robotic flapper reveals that flies use torque coupling in rapid banked turns,” Science 361, 1089 (2018).
- Y. Chen et al., “Controlled flight of a microrobot powered by soft artificial muscles,” Nature 575, 324 (2019).